Слияние кода завершено, страница обновится автоматически
Этот проект посвящён глубокой разработке алгоритмов геометрических измерений. От группы 16307 из Тяньцзиньского университета науки и технологий, Китай. Вы можете связаться с нами по адресу 770896174@qq.com, и я буду рад вашему вкладу. Вдохновение получено от программного обеспечения для машинного зрения HALCON.
В областях навигации, промышленных измерений, геодезии и картографии и т. д. нам необходимо разработать большое количество алгоритмов геометрических измерений, и большинство из них можно использовать повторно. Однако лишь немногие пытались их классифицировать и упорядочить. Поэтому мы пытаемся сделать что-то, чтобы упростить задачу разработчикам на основе Python.
Этот репозиторий может решить следующие три типа задач:

Любой геометрический алгоритм можно рассматривать как результат слияния физических величин и геометрических элементов. Геометрические элементы включают точку, линию и плоскость, а физические величины включают угол, расстояние, координату, вектор и позу. Любую функцию можно назвать в форме cal[...]From[...] и между ними можно выполнить любое преобразование. Например, как calCoordinateFrome2Lines.
The drawing tools can refer to here.
Координата: $$ P=\begin{bmatrix} x\\ y\\ z\\ \end{bmatrix} $$ →numpy.array
Вектор: $$ \vec{l}=\begin{bmatrix} a\\ b\\ c\\ \end{bmatrix} $$ →numpy.array
Поза: $$ R=\begin{bmatrix} r11&r12&r13\\ r21&r22&r23\\ r31&r32&r33\\ \end{bmatrix}{3×3} ,T=\begin{bmatrix} t_x\\ t_y\\ t_z\\ \end{bmatrix}{3×1} $$
→numpy.array
Расстояние: $$ d $$ →float
Угол: $$ θ $$ →float
Плоскость: $$ Ax+By+Cz+D=0,[A,B,C,D] $$ →numpy.array
Линия: $$ \frac{x-x_0}{m}=\frac{y-y_0}{n}=\frac{z-z_0}{p},[m,n,n,x_0,y_0,z_0] $$
→numpy.array
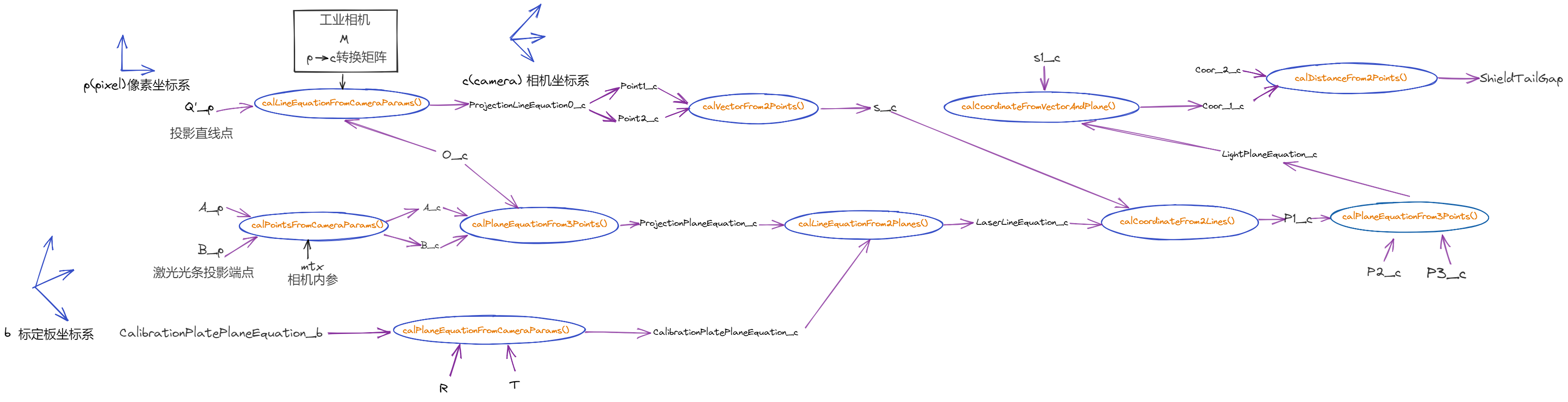
Возьмём в качестве примера проект системы измерения зазора хвостового щита, диаграмму потока вычислений можно показать следующим образом:
Вы можете оставить комментарий после Вход в систему
Неприемлемый контент может быть отображен здесь и не будет показан на странице. Вы можете проверить и изменить его с помощью соответствующей функции редактирования.
Если вы подтверждаете, что содержание не содержит непристойной лексики/перенаправления на рекламу/насилия/вульгарной порнографии/нарушений/пиратства/ложного/незначительного или незаконного контента, связанного с национальными законами и предписаниями, вы можете нажать «Отправить» для подачи апелляции, и мы обработаем ее как можно скорее.
Комментарии ( 0 )