# GPIO
- [GPIO接口](#gpio接口)
- [概要](#概要)
- [什么是GPIO](#什么是gpio)
- [预备知识](#预备知识)
- [电信号](#电信号)
- [模拟信号](#模拟信号)
- [数字信号](#数字信号)
- [高低电平](#高低电平)
- [上升沿 下降沿](#上升沿-下降沿)
- [GPIO端口通用方法集合](#gpio端口通用方法集合)
- [GPIO引脚定义](#gpio引脚定义)
- [machine.Pin API详解](#machinepin-api详解)
- [宏定义](#宏定义)
- [类](#类)
- [定义Pin](#定义pin)
- [函数](#函数)
- [Pin.init([mode])](#pininitmode)
- [Pin.value([value])](#pinvaluevalue)
- [Pin.on()](#pinon)
- [Pin.off()](#pinoff)
- [示例](#示例)
## GPIO接口
### 概要
  本节讲解`machine` 模块中的`Pin`类以及数字信号的相关概念。
#### 什么是GPIO
- GPIO(General-purpose input/output)即通用型输入输出。
- GPIO控制器通过分组的方式管理所有GPIO管脚,每组GPIO有一个或多个寄存器与之关联,通过读写寄存器完成对GPIO管脚的操作。
#### 预备知识
##### 电信号
  信号是运载消息的工具,是消息的载体。从广义上讲,它包含光信号、声信号和电信号等。**电信号是指随着时间而变化的电压或电流**,因此在数学描述上可将它表示为时间的函数,并可画出其波形。由于非电的物理量可以通过各种传感器较容易地转换成电信号,而电信号又容易传送和控制,所以使其成为应用最广的信号。
  在电子线路中,我们将电信号进行如下的划分:
- 模拟信号
- 数字信号

##### 模拟信号
  模拟信号是指信息参数在给定范围内表现为**连续**的信号。
  广播的声音信号,或图像信号等生活中许多常见的信号,都是模拟信号。
##### 数字信号
  数字信号是指幅度的取值是离散的,幅值表示被限制在有限个数值之内。二进制码就是一种数字信号。在这种二进制体系中,我们用 0 表示 `低电平`, 1表示 `高电平`。很可能你会问,高低电平指什么?
##### 高低电平
  你可以简单的理解为较高的电压为高电平,较低的电压自然就是低电平。当然,肯定有一套判定高低电平的准则:
**一般规定低电平为0~ 0.25V,高电平为3.5~5V。**
  当然对于有些不同的芯片或者电路模组,对高电平或低电平的定义可能会有所差异。
##### 上升沿 下降沿
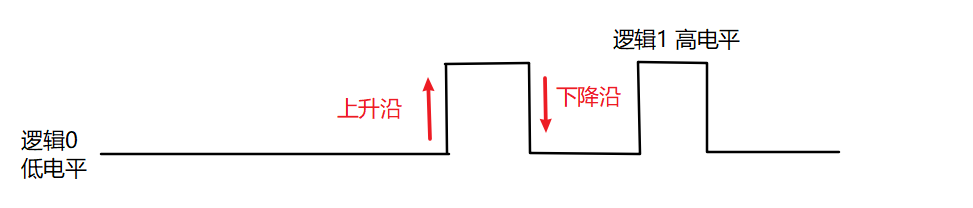
  当低电平突然跃升为高电平时,电信号的变化时间极快,几乎呈直角,从低电平直线攀升至高电平,这个电平跳变的过程我们称之为**上升沿**
  当高电平突然下降为低电平时,电信号的变化时间极快,几乎呈直角,从高电平直线跌入低电平,这个电平跳变的过程我们称之为**下降沿**
  同时从上面这张图你也可以看出,在数字信号中,我们的电压变化理论上只有 低电平0 或 高电平1,因此我们的数字信号能够更好的被计算机所理解,并进行快速的运算。
#### GPIO端口通用方法集合
  GPIO控制器通过分组的方式管理所有GPIO管脚,包括:
- 设置管脚方向: 方向可以是输入或者输出(暂不支持高阻态)
- 读写管脚电平值: 电平值可以是低电平或高电平
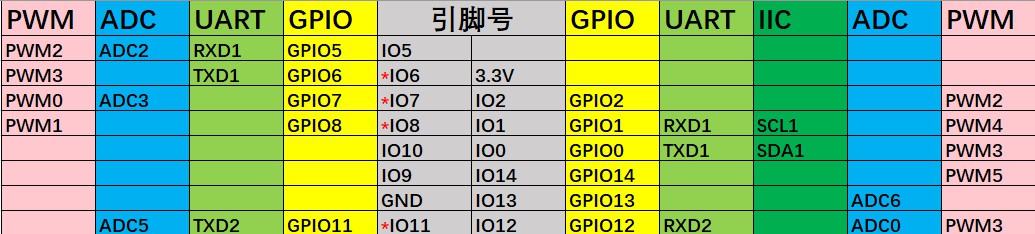
## GPIO引脚定义
  GPIO拥有0~14 共15个引脚。
  其中引脚号直接对应于Waffle Nano 硬件实际物理引脚排布。
  并且注意,在硬件屏幕接入到Waffle Nano开发板上时,引脚号为`IO6`、`IO7`、`IO8`、`IO11`硬件引脚(下图中带有*号的引脚)已被屏幕占用,不建议二次使用。`IO2`在程序上传时需要保持拉低状态。`IO9`、`IO10`作为内部IIC总线通信使用,内部将始终存在上拉电阻,保持上拉状态。`IO3`、`IO4`作为编程串口被持续占用,板子未将此引出。
  pin 0的功能如下:
| **功能** |
| --------- |
| GPIO0 |
| UART1 TXD |
| SPI1 CK |
| PWM3 OUT |
| I2C1 SDA |
  pin 1的功能如下:
| **功能** |
| --------- |
| GPIO1 |
| UART1 RXD |
| SPI1 RXD |
| PWM4 OUT |
| I2C1 SCL |
  pin 2的功能如下:
| **功能** |
| ---------- |
| GPIO2 |
| SPI1 TXD |
| PWM2 OUT |
  pin 5的功能如下:
| **功能** |
| --------- |
| GPIO5 |
| UART1 RXD |
| SPI0 CSN |
| PWM2 OUT |
| I2C0 MCLK |
  pin 6的功能如下:
| **功能** |
| ----------- |
| GPIO6 |
| UART1 TXD |
| SPI0 CK |
| PWM3 OUT |
  pin 7的功能如下:
| **功能** |
| --------- |
| GPIO7 |
| SPI0 RXD |
| PWM0 OUT |
  pin 8的功能如下:
| **功能** |
| ----------- |
| GPIO8 |
| SPI0 TXD |
| PWM1 OUT |
  pin 9的功能如下:
| **功能** |
| --------- |
| GPIO9 |
| I2C0 SDA |
| SPI0 CK |
| PWM1 OUT |
  pin 10的功能如下:
| **功能** |
| --------- |
| GPIO10 |
| I2C0 SCL |
| SPI0 TXD |
| PWM0 OUT |
  pin 11的功能如下:
| **功能** |
| ------------ |
| GPIO11 |
| UART2 TXD |
| PWM2 OUT |
  pin 12的功能如下:
| **功能** |
| ------------ |
| GPIO12 |
| PWM3 OUT |
  pin 13的功能如下:
| **功能** |
| --------- |
| UART0 TXD |
| GPIO13 |
| PWM4 OUT |
| I2C0 SDA |
  pin 14的功能如下:
| **功能** |
| --------- |
| UART0 RXD |
| GPIO14 |
| PWM5 OUT |
| I2C0 SCL |
## machine.Pin API详解
  使用`from machine import Pin`导入 `machine` 模块的硬件类 `Pin`
  再使用 `TAB` 按键来查看 `Pin` 中所包含的内容:
```python
>>> from machine import Pin
>>>Pin.
value GPIO IN INT_EDGE
INT_LEVEL IRQ_FALLING IRQ_RISING OUT
PULL_DOWN PULL_NONE PULL_UP init
irq off on pull
```
### 宏定义
  下面的宏定义用于配置pin,也就是将对应编号的真实的管脚配置成输入或者输出或者其他模式
| 宏定义 | 含义 |
| ------------- | :--------------- |
| Pin.GPIO | 作为GPIO接口 |
| Pin.OUT | 信号输出 |
| Pin.IN | 信号输入 |
| Pin.PULL_DOWN | 是否接入下拉电阻 |
| Pin.PULL_NONE | 无上拉、下拉电阻 |
| Pin.PULL_UP | 是否接入上拉电阻 |
| Pin.INT_EDGE | 边沿触发中断 |
| Pin.INT_LEVEL | 电平触发中断 |
| Pin.IRQ_RISING | 上升沿触发 |
| Pin.IRQ_FALLING | 下降沿触发 |
### 类
  class machine.Pin(id,mode,pull)
可传入参数:
- `id`:引脚号
- `mode`:引脚模式
- Pin.IN — 输入
- Pin.OUT — 输出
- `pull`:拉电阻模式
- Pin.PULL_NONE — 无上拉、下拉电阻
- Pin.PULL_UP — 上拉电阻
- Pin.PULL_DOWN — 下拉电阻
### 构造Pin
  示例:
```python
from machine import Pin
gpio = Pin(13, dir=Pin.OUT,pull=Pin.PULL_DOWN) #将GPIO 13 设置为输出模式,并且进入下拉模式
```
### 函数
#### Pin.init(mode)
  函数说明:初始化引脚。
  mode:
- Pin.IN — 输入
- Pin.OUT — 输出
  示例:
```python
from machine import Pin
pin = Pin(13)
pin.init(Pin.OUT) #初始化13号引脚为输出模式
```
#### Pin.value(value)
  函数说明:获取或设置引脚电平状态,根据引脚的逻辑电平返回0或1。
  注意:不带参数时是读取输出电平,带参数时是设置输出电平。
  value :可以是 True / False ,也可以是 1 / 0 。
  示例:
```python
>>> pin13 = Pin(13,Pin.OUT) #设置13号引脚为输出模式
>>> pin13.value() #读取13号引脚输出电平
0
>>> pin13.value(True) #设置13号引脚输出电平为高电平
>>> pin13.value()
1
>>> pin13.value(0) #设置13号引脚输出电平为低电平
>>> pin13.value()
0
```
#### Pin.on()
  函数说明:设置引脚输出电平状态返回1。
  示例:
```python
>>>p13=Pin(13,Pin.OUT)
>>>p13.on()
>>>p13.value()
```
#### Pin.off()
  函数说明:设置引脚输出电平状态为0。
  示例:
```python
>>>p13=Pin(13,Pin.OUT)
>>>p13.off()
>>>p13.value()
```
#### Pin.pull(value)
  函数说明:获取或设置引脚拉电阻状态,根据引脚的拉电阻状态返回0(无拉电阻)或1(上拉电阻)或2(下拉电阻)。
  注意:1.不带参数时是读取引脚拉电阻状态,带参数时是设置引脚拉电阻状态。2.`IO9`和`IO10`默认为恒定上拉状态。
  value :
- Pin.PULL_NONE
0(无拉电阻)
- Pin.PULL_UP
1(上拉电阻)
- Pin.PULL_DOWN
2(下拉电阻)
  示例:
```python
>>>p13=Pin(13,Pin.OUT)
>>>p13.pull(Pin.PULL_DOWN) #设置13号引脚为下拉状态
>>>p13.pull() #查看此时引脚拉状态
0
```
#### Pin.irq(callback, trigger, int_type)
  函数说明:设置引脚中断
  参数说明:`callback`为中断触发函数,当检测到有中断被触发时将会运行此函数。`trigger`为中断触发条件,只有满足条件时中断才被触发。`int_type`为中断触发方式。
  参数值域:
- callback
- 一般函数
- trigger
- Pin.IRQ_RISING
- Pin.IRQ_FALLING
- int_type
- Pin.INT_EDGE
- Pin.INT_LEVEL
  示例:
```python
from machine import Pin #导入Pin 库
pin = Pin(0, dir=Pin.IN,pull=Pin.PULL_UP) #构造Pin对象,使其作用于0号引脚,将其设置为输入模式,并且设置为上拉状态
def callback(p): #设置回调函数,每次检测到中断触发时所运行的函数,其中p为触发中断的Pin对象
print('pin change: ', p)
ret = pin.irq(callback, trigger=Pin.IRQ_RISING, int_type=Pin.INT_EDGE) #将pin设置为一个上升沿触发的中断,其触发方式是边沿触发中断,能检测pin对应的实际物理引脚的电平状态的突变。
```